Vector Quadrupole::B(const Vector &position) {
double dX,dY,dZ; //offsets from quadrupole center
double Bx_,By_,Bz_; //magnetic field in the transformed coordinates
//Calculate offset
dX=position.x-center.x;
dY=position.y-center.y;
dZ=position.z-center.z;
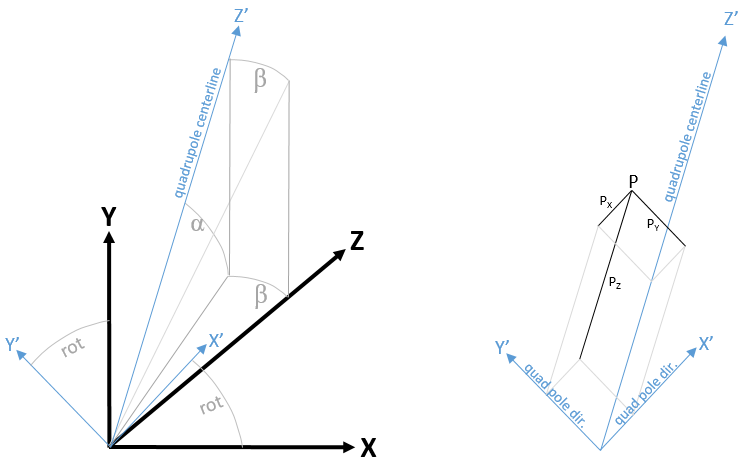
//Transform
double Px=dX*cos(Beta)+dZ*sin(Beta);
double Py=-dX*sin(Alpha)*sin(Beta)+dY*cos(Alpha)+dZ*sin(Alpha)*cos(Beta);
double Pz=-dX*cos(Alpha)*sin(Beta)-dY*sin(Alpha)+dZ*cos(Alpha)*cos(Beta);
dX=Px*cos(rot)+Py*sin(rot);
dY=-Px*sin(rot)+Py*cos(rot);
Px=dX;
Py=dY;
if (Pz>=0.0 && Pz<=L) { //if inside the quadrupole
Bx_=-K*Py;
By_=-K*Px;
} else {
Bx_=0.0;
By_=0.0;
}
Bz_=0.0;
//Inverse transformation
Px=Bx_*cos(rot)-By_*sin(rot);
Py=Bx_*sin(rot)+By_*cos(rot);
Pz=Bz_;
return Vector(Px*cos(Beta)-Py*sin(Alpha)*sin(Beta)-Pz*cos(Alpha)*sin(Beta),
Py*cos(Alpha) -Pz*sin(Alpha),
Px*sin(Beta)+Py*sin(Alpha)*cos(Beta) +Pz*cos(Alpha)*cos(Beta);
}